Планетоход


Планетоход — это аппарат, предназначенный для передвижения по поверхности другой планеты. Некоторые планетоходы были транспортными для передвижения членов экипажа космической экспедиции, другие были исследовательскими — дистанционно управляемыми роботами.
Планетоходы доставляются на поверхность исследуемого небесного тела посадочными модулями, которые могут являться как самостоятельными, так и отделяемыми космическими аппаратами.
Содержание
- 1 Назначение
- 2 Преимущества и недостатки
- 3 Требования и особенности
- 4 Варианты конструкции
- 5 Создатели планетоходов
- 6 Запущенные планетоходы
- 7 Текущие экспедиции
- 8 Планируемые экспедиции и прототипы
- 9 Прочие планетоходы
- 10 Места посадок автоматических станций на Марсе
- 11 Примечания
- 12 Источники
- 13 См. также
Назначение
Все когда-либо использовавшиеся в космосе планетоходы были либо исследовательскими, либо транспортными.
Исследовательские планетоходы предназначены для выполнения научных исследований поверхности исследуемой планеты. Такие планетоходы могут быть дистанционно управляемыми, частично или полностью автономными.
Транспортные планетоходы предназначены для перемещения космонавтов и грузов по сухой поверхности планеты. Такие планетоходы с экипажем на борту управляются непосредственно экипажем или являются телеуправляемыми или частично либо полностью автономными.
В будущем возможно также использование планетоходов для проведения строительных работ, а также как мобильных ретрансляторов и мобильных убежищ. Возможно и создание планетоходов комбинированного назначения, что делает указанную классификацию несколько условной.
Кроме того, подобные планетоходам телеуправляемые аппараты уже используются на Земле для выполнения работы, опасной для людей — например, при разминировании или в условиях опасного для людей радиационного фона.[1]
Преимущества и недостатки
Планетоходы обладают несколькими преимуществами перед неподвижными аппаратами:
- они обследуют бо́льшую территорию, могут уже в процессе работы направляться для исследования заинтересовавших исследователей объектов,
- способны менять положение относительно Солнца, чтобы эффективно использовать солнечные батареи в зимний период.
- способны выбирать и менять маршрут следования.
Кроме того, разработки подобных технологий вносят свой вклад в развитие систем дистанционного управления подвижными роботами.
Преимущества перед орбитальными аппаратами:
- способность непосредственно исследовать объекты размером вплоть до микроскопического и выполнять эксперименты.
Недостатки планетохода в сравнению с орбитальными аппаратами: более высокий риск неудачи, вследствие сложности посадки или других проблем и ограниченность исследуемой площади районом места приземления (который может быть задан лишь приблизительно).
Требования и особенности
Планетоходы доставляются на объект исследования космическими кораблями и работают в условиях, сильно отличающихся от земных. Это вызывает некоторые специфические требования к их устройству.
Надежность
Планетоход должен обладать стойкостью к перегрузкам, низким и высоким температурам, давлению, пылевому загрязнению, химической коррозии, космической радиации, сохраняя работоспособность без ремонтных работ в течение требуемого для выполнения исследований времени.

Компактность
Объём космических кораблей ограничен, поэтому в конструкции планетоходов и при их укладке уделяется внимание экономии пространства. Может складываться ходовая часть планетохода, либо аппарат в целом; также выполняется крепление аппарата к кораблю. Устанавливаются средства развертывания планетохода в рабочее положение и отделения от посадочного модуля. Так, крепления марсоходов «Спирит» и «Оппортьюнити» к их посадочным модулям удалялись при помощи небольших пиротехнических зарядов.
Дистанционное управление и автономность
Планетоходы (и другие аппараты), находящиеся на планетах значительно удаленных от Земли, не могут управляться в режиме реального времени из-за значительного запаздывания командных сигналов и ответных сигналов от аппарата. Задержка возникает, поскольку радиосигналу вследствие конечности его скорости распространения требуется время, чтобы дойти до другой планеты или от неё до Земли. Поэтому такие планетоходы способны некоторое время функционировать, в том числе передвигаться и выполнять исследования, автономно по заложенным в них программам, получая команды лишь время от времени.

Варианты конструкции
Конструкция планетохода зависит от условий небесного тела, на котором он будет использоваться, объема предусмотренных работ, его требуемого срока службы, а также от необходимости пребывания на нем людей.
Общее требование к планетоходам — обладание хорошей проходимостью, поэтому большое внимание уделяется конструкции подвески, колес и привода. К примеру, все марсоходы НАСА использовали балансирные подвески типа Rocker Bogie. Особенности этих подвесок — способность преодолевать препятствия размером вдвое больше диаметра колеса, сохраняя контакт всех шести колес с опорной поверхностью, и уменьшение угла наклона корпуса аппарата.
Особенность исследовательских планетоходов — наличие на борту аппаратуры для проведения научных исследований.
Транспортные планетоходы оснащаются местами для размещения грузов или экипажа. Для использования в разнообразных условиях работы они должны обладать более широким скоростным и силовым диапазоном работы движителя.
Среди прочих выделяются планетоходы для передвижения космонавтов. Условия пребывания людей на борту планетохода предъявяют к конструкции множество особых требований. Такие планетоходы могут иметь открытую конструкцию или же оснащаться герметичной кабиной. В последнем случае планетоход должен быть оборудован всем необходимым для жизни и работы космонавтов: дыхания, питания, гигиены, обзора местности, проведения исследований, выхода на поверхность и подъема на борт. Все это усложняет конструкцию машины. В то же время, участие человека дает возможность ее обслуживания и ремонта.
Разработка планетоходов для выполнения строительных работ, рытья и перемещения грунта, еще не продвинулась значительно.
Создатели планетоходов

- А. Л. Кемурджиан, советский инженер-конструктор. Организовал группу конструкторов во ВНИИтрансмаш, заложил основы проектирования планетоходов как робототехнических транспортных машин космического назначения. В 1992 году поддержал создание Научно-технического закрытого акционерного общества «Ровер» (ныне ЗАО «НТЦ „Ровер“ им. А. Л. Кемурджиана»)[2].
- Компания «Боинг» вместе с субподрядчиком — лабораторией военных исследований компании General Motors, выпустившая четыре лунных автомобиля для программы «Аполлон» и несколько их моделей.
- Стивен Сквайрес, профессор Корнеллского университета и руководимая им команда — создатели марсоходов «Спирит» и «Оппортьюнити».
Запущенные планетоходы
Луноход-1

Первый планетоход, Луноход-1, был доставлен на поверхность Луны 17 ноября 1970 года автоматической межпланетной станцией Луна-17. Предназначался для изучения особенностей лунной поверхности, радиоактивного и рентгеновского космического излучения на Луне, химического состава и свойств грунта. Успешно проработал до 14 сентября 1971 года, после чего вышел из строя. За время нахождения на поверхности Луны проехал 10 540 м, передал на Землю 211 лунных панорам и 25 тысяч фотографий. Более чем в 500 точках по трассе движения изучались физико-механические свойства поверхностного слоя грунта, а в 25 точках проведён анализ его химического состава[3].

Лунные автомобили программы «Аполлон»
Лунные автомобили — это планетоходы, использовавшиеся на Луне в рамках программы «Аполлон» для обеспечения большей подвижности экипажей экспедиций Аполлон-15 (прилунение состоялось 30 июля 1971 г.), Аполлон-16 (прилунение состоялось 21 апреля 1972 г.) и Аполлон-17 (прилунение состоялось 11 декабря 1972 г.) Вездеходы значительно расширили доступную для астронавтов площадь лунной поверхности. Ранее астронавты могли перемещаться на Луне лишь непосредственно вокруг места посадки из-за сковывавших их скафандров и других приборов жизнеобеспечения. Пользуясь же вездеходом, можно было развивать скорость до 13 км/ч.
Луноход-2

Второй советский лунный дистанционно-управляемый вездеход был доставлен на поверхность Луны 16 января 1973 года автоматической межпланетной станцией Луна-21. Он был предназначен для изучения механических свойств лунной поверхности, фотосъёмки и телесъёмки Луны, проведения экспериментов с наземным лазерным дальномером, наблюдений за солнечным излучением и других исследований. Аппарат проработал около четырёх месяцев, за это время было проведено 60 сеансов радиосвязи, получено 86 панорам и более 80 тысяч телевизионных снимков лунной поверхности. Были также получены стереоскопические изображения наиболее интересных особенностей лунного рельефа, позволившие провести детальное изучение его строения. В последний раз телеметрическая информация от аппарата была принята 10 мая 1973 года.
ПрОП-М
Прибор оценки проходимости — Марс (ПрОП-М) — название советских марсоходов. Идентичные марсоходы входили в состав автоматических марсианских станций которые должны были быть доставлены на поверхность Марса в 1971 году спускаемыми аппаратами автоматических межпланетных станций Марс. Спускаемый аппарат Марс-2 разбился 27 ноября 1971 при неудачной попытке мягкой посадки. Спускаемый аппарат Марс-3 совершил мягкую посадку 2 декабря 1971, но сигнал с самой марсианской станции, к которой был подключен по кабелю марсоход, пропал через 14,5 секунд. Информация с марсохода не была получена.
Среди других запущенных планетоходов они выделялись прежде всего своей системой передвижения: перемещаться марсоходы должны были при помощи двух шагающих «лыж», размещенных по бокам. Такая система была выбрана из-за отсутствия сведений о поверхности Марса.[4]

Соджонер
Марсоход «Соджонер» являлся частью аппарата «Марс Патфайндер», совершившего посадку на Марсе 4 июля 1997 года. Первый работающий марсоход. За время своей работы, продолжавшейся до 27 сентября 1997 года, этот небольшой марсоход сделал и передал 550 фотографий и более 15 раз провел химический анализ марсианских камней и грунта.
Юйту
Луноход «Юйту» Китайской Народной Республики был доставлен на Луну аппаратом «Чанъэ-3», совершившим прилунение 14 декабря 2013 года. Луноход проехал несколько десятков метров, однако затем его двигательная система перестала действовать, и далее он работал лишь в качестве стационарного лунного модуля.
Текущие экспедиции
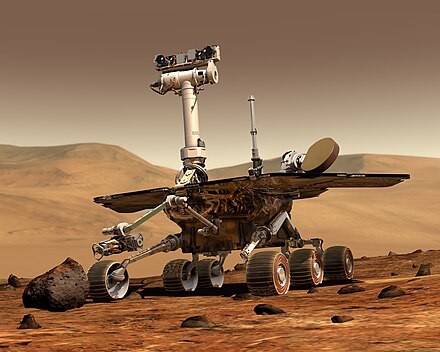
Mars Exploration Rover
Mars Exploration Rover — продолжающаяся по настоящее время миссия по исследованию Марса марсоходом «Оппортьюнити». Ранее в миссии также участвовал такой же марсоход под названием «Спирит», прекратив работу из-за технических проблем в марте 2010 года. Посадочные модули с марсоходами прибыли на Марс в январе 2004 года. Задача миссии — изучение поверхности планеты и ее геологии. Основные цели — обнаружение и описание различных типов скал и грунтов, содержащих следы существования воды на этой планете.

Curiosity
Curiosity (рус. Любопытство/Любознательность) — работающий в настоящее время марсоход НАСА третьего поколения, представляющий собой автономную химическую лабораторию в несколько раз больше и тяжелее предшественников. Посадка на поверхность Марса состоялась в августе 2012 года. Аппарат проводит полноценный анализ марсианских почв и компонентов атмосферы. Вместо традиционных для планетоходов солнечных батарей в качестве источника энергии используется радиоизотопный термоэлектрический генератор.
Для безопасной посадки марсохода на поверхность планеты вместо посадочного модуля, заключающего в себе марсоход и снабженного надувными подушками, смягчающими удар о поверхность, использовалась система «Небесный кран». Это была конструкция, снабженная восемью реактивными двигателями для торможения и обеспечения мягкой посадки, и резервуарами с топливом. Снизу к «крану» на тросах был подвешен марсоход. Когда он оказался на поверхности, тросы отсоединились, после чего «небесный кран» отлетел в сторону, используя свои двигатели.
Планируемые экспедиции и прототипы




Чанъэ-4
Является дублёром лунохода «Юйту» (2013). Запуск ожидается в 2018 году.
Чандраян-2
В рамках экспедиции Чандраян-2 планируется использование шестиколесного лунохода весом 58 кг, оснащённого солнечными батареями, для изучения района южного полюса Луны в течение одного года[5].
Луна-Грунт
В рамках миссии «Луна-Грунт» Россия планирует отправку в 2015—2017 нескольких луноходов массой около 300 кг.
ExoMars
Для участия в миссии ExoMars Европейским космическим агентством разрабатывается марсоход весом 271 кг. Он будет искать жизнь на Марсе с помощью бура и научного комплекта «Pasteur». В качестве источника энергии будет оснащен солнечными батареями. Запуск его к Марсу в настоящее время планируется на 2018 год[6].
Марс-Астер
Россия разрабатывает свой марсоход для запуска в 2018 году. Его прототипы уже испытывались в пустыне Мохаве и на Камчатке в 1988—1994 годах. Все это время образцы, готовые к полету, лежали на складе. Теперь их готовят к запуску на ракете-носителе «Союз-2» в 2018 году.
Lunar Electric Rover
Небольшой вездеход с 6 ведущими колёсными осями. Аппарат работает от аккумуляторов, позволяющих в условиях лунной гравитации и поверхности развивать ему скорость до 10 км/час. В герметичной кабине устроены места для двух астронавтов и небольшой отсек для грузов.
ATHLETE
(дословно «Аппарат для исследования внеземных поверхностей любого типа, снабженный шестью конечностями») — автоматический шестиногий транспортный вездеход, разрабатываемый Jet Propulsion Laboratory (JPL) и NASA.
Audi Lunar Quattro
Полетит на Луну в рамках программы Google Lunar X PRIZE в первой половине 2019 года на борту двухступенчатой ракеты SpaceX Falcon 9.
Венероход
США разрабатывают планетоход для запуска на Венеру в 2027 году.
Прочие планетоходы
Планетоходы, запуск которых не состоялся:

Луноход-3
Третий советский аппарат из серии Луноход планировалось доставить на Луну в 1977 году при помощи межпланетной станции Луна-25, но её запуск не состоялся. Впоследствии Луноход-3 так и не был отправлен на Луну. В настоящее время он находится в музее НПО имени Лавочкина.
Венероход
Венероход с колёсно-шагающим движителем был создан в СССР в 1986 году, однако так и не был запущен[7].
Наноход
Изначально в японской миссии «Хаябуса» планировался и наноход — миниатюрный самоходный робот, который должен был спуститься с основного зонда на поверхность астероида и исследовать его в нескольких местах. Несмотря на то, что он был очень маленьким, на нём размещалось 4 научных прибора. Но в ноябре 2000 года проект был закрыт по финансовым причинам.
Места посадок автоматических станций на Марсе


Примечания
- ↑ Планетоходы прошлого и будущего
- ↑ Научно-техническое общество «Ровер»
- ↑ 35 лет назад советский космический аппарат «Луноход-1» высадился на поверхность Луны
- ↑ Внеземной транспорт: Планетоходы
- ↑ Russia Plans Ambitious Robotic Lunar Mission
- ↑ Европейское космическое агентство отложило запуск марсохода ExoMars до 2018 года
- ↑ Венероход ХМ-ВД-2
Источники
- Планетоходы / А. Л. Кемурджиан, В. В. Громов, И. Ф. Кажукало и др.; под ред. А. Л. Кемурджиана — М., Машиностроение, 1993.
- How Lunar Rovers Work — статья на сайте HowStuffWorks.
- Луноход-1: Горелово — Тюра-Там — Луна. До востребования
См. также
| Основные статьи | |
|---|---|
| Типы роботов | |
| Известные роботы | |
| Связанные термины | |
Основа этой страницы находится в Вики. Текст доступен по лицензии CC BY-SA 3.0 Unported License.
Wikipedia® — зарегистрированный товарный знак организации Wikimedia Foundation, Inc. monamir.ru является независимой компанией и не аффилирована с Фондом Викимедиа (Wikimedia Foundation).
E-mail: admin@monamir.ru
Сайт Monamir.ru является НЕофициальным.

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}